Mini 360 Degree Continuous Servo Code
Continuous servos have a different structure to them than regular servos.
A regular servo simply goes to t degree angle to tell it, where as continuous servos of course keep going around, so we must program them slightly differently, like so:
// Include the servo library
#include <Servo.h>
// Create the servo object
Servo myservo;
// Setup
void setup() {
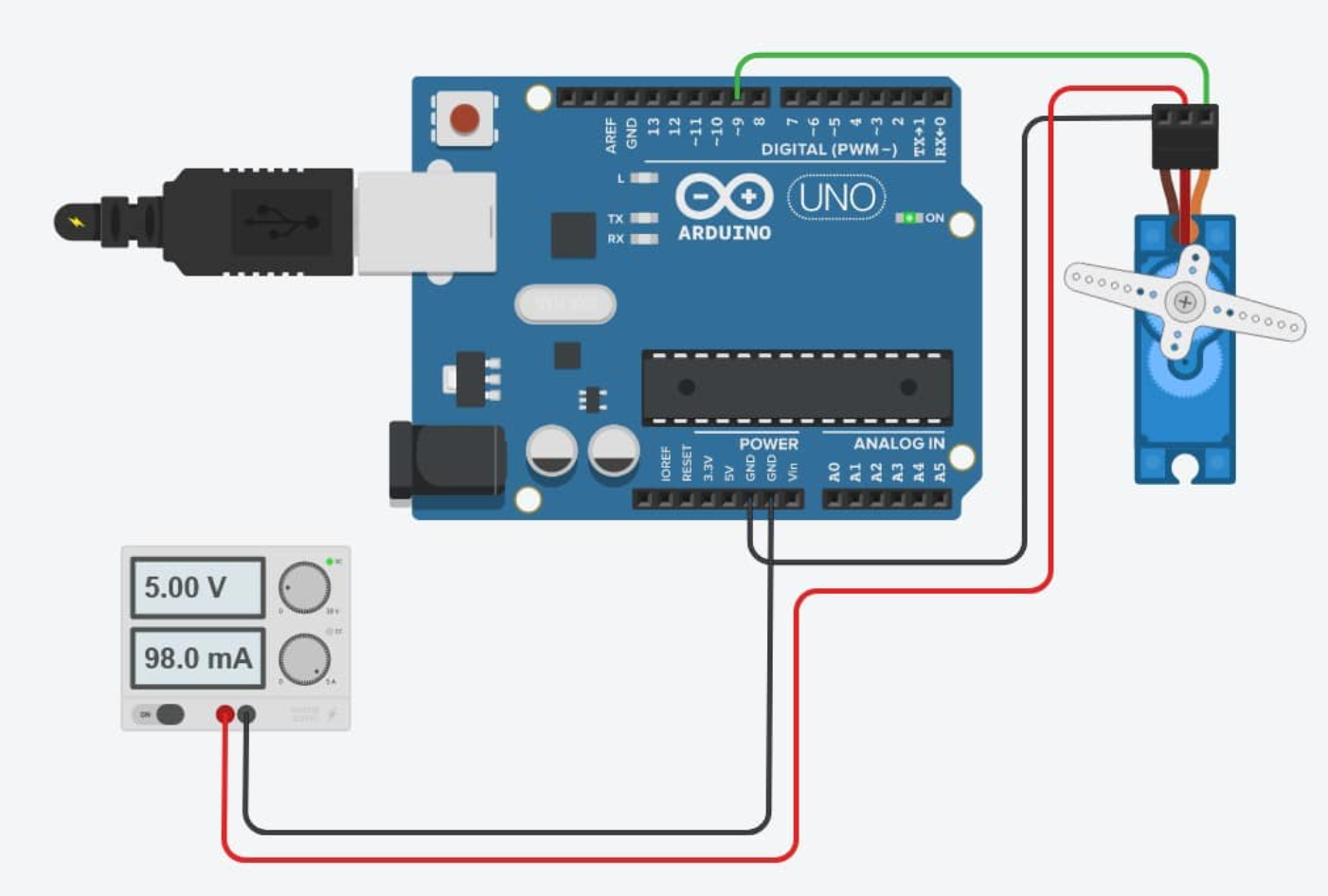
myservo.attach(9); // attach the servo to our servo object
myservo.write(90); // stop the motor
}
// Main loop
void loop() {
myservo.write(45); // rotate the motor counter-clockwise
delay(5000); // keeps rotating for 5000 milliseconds (5 seconds)
myservo.write(90); // stop the motor
delay(5000); // stay stopped
myservo.write(135); // rotate the motor clockwise
delay(5000); // keeps rotating
}