Soft Robotics Example Projects
CCI Projects
External Projects
Research Papers / Experimental Work
3D Knit for Pneumatic Soft Robots

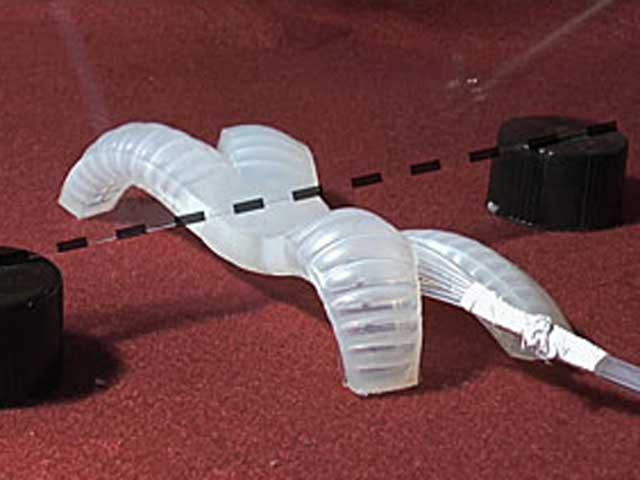
Walking soft-bodied 'starfish' robot from the Whitesides lab.
Machine Knitting Soft Actuated Objects from the Morphing Matter Lab

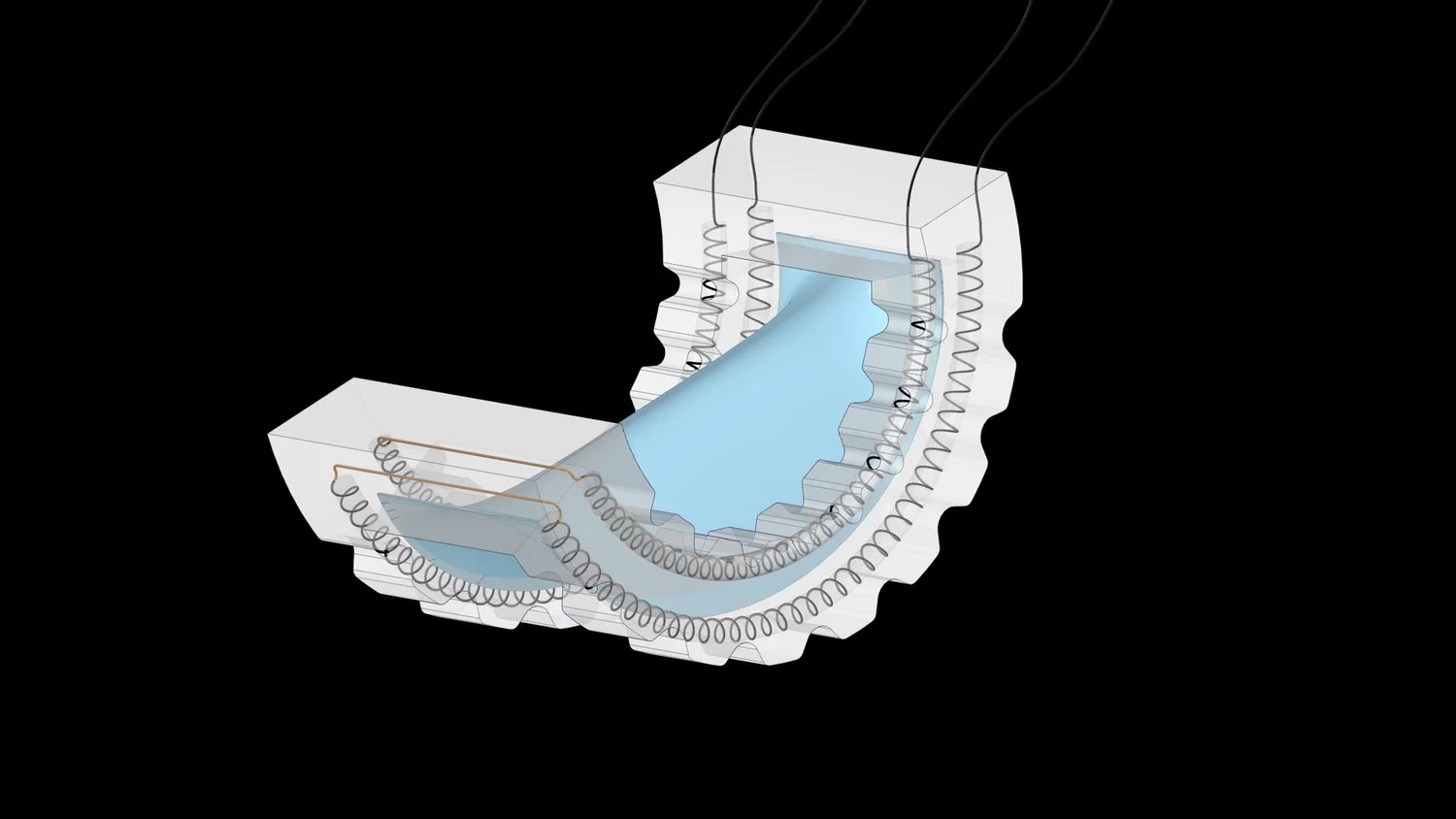
Bistable Soft Actuator from the Morphing Matter lab, that uses nitinol shape memory alloy to snap between different movement types.
How-to Guides
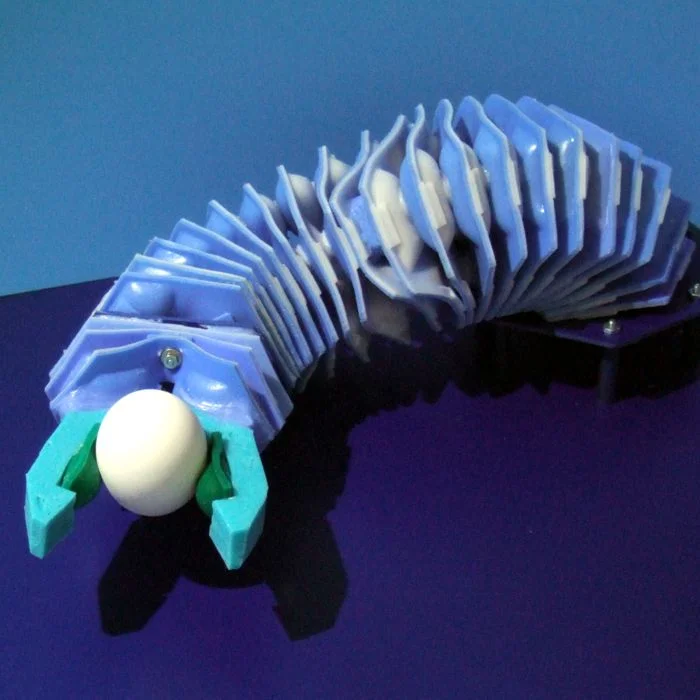
Artificial Muscle Arm and Gripper