Using Go1 Edu robot dog by Unitree
Safety guidelines
This robot requires an induciton before you use it for the first time. If you have not completed this induction, please contact Rohit Ramesh Thampy on slack
- Users must be 18 or over to use this robot.
- Always ensure to follow the risk assessment for the robot.
- If you want to use this robot anywhere else other than the locations mentioned within the risk assessment of the robot, please contact Rohit Ramesh Thampy on Slack or Outlook.
- Do not use this robot outdoors as it is not designed for outdoor applications.
- Do not use this robot on stairs, it can only work on stairs that are 10cm in height, which are quite rare.
- Do not use this robot when the robot's or the remote controller's battery is at 1 bar.
- Ensure to charge the robot's battery and the remote controll to its full capacity before using it.
- If you are not confident in using this robot after the induction or need a referesher on using it, please contact Rohit Ramesh Thampy on Slack or Outlook.
- Users of this robot dog is expected to return it in the same state as it was, when it was booked.
What is it?
The Go1 Edu robot dog (otherwise known as a quadruped) is an agile, 4 legged robotic platform.
What can it do?
Since it is a legged robot, the Go1 comes with some sophesticated control algorithms built-in, that allows it to balance itself and walk around.
Without any modifications, the Go1 robot dog is capable of doing basic collision avoidance using its onboard stereo cameras. This version also comes with a 2D Lidar, and when that is attached to the robot, it is cabable of doing autonomous navigation.
Since this is a robotic platform, other sensor payloads or hardware can be interfaced with it to extend its capability.
Getting started
The startup and shutdown procedures for the Go1 are covered in more detail in the induction, therefore please ensure to book and attend the induction before using this robot.
Starting up
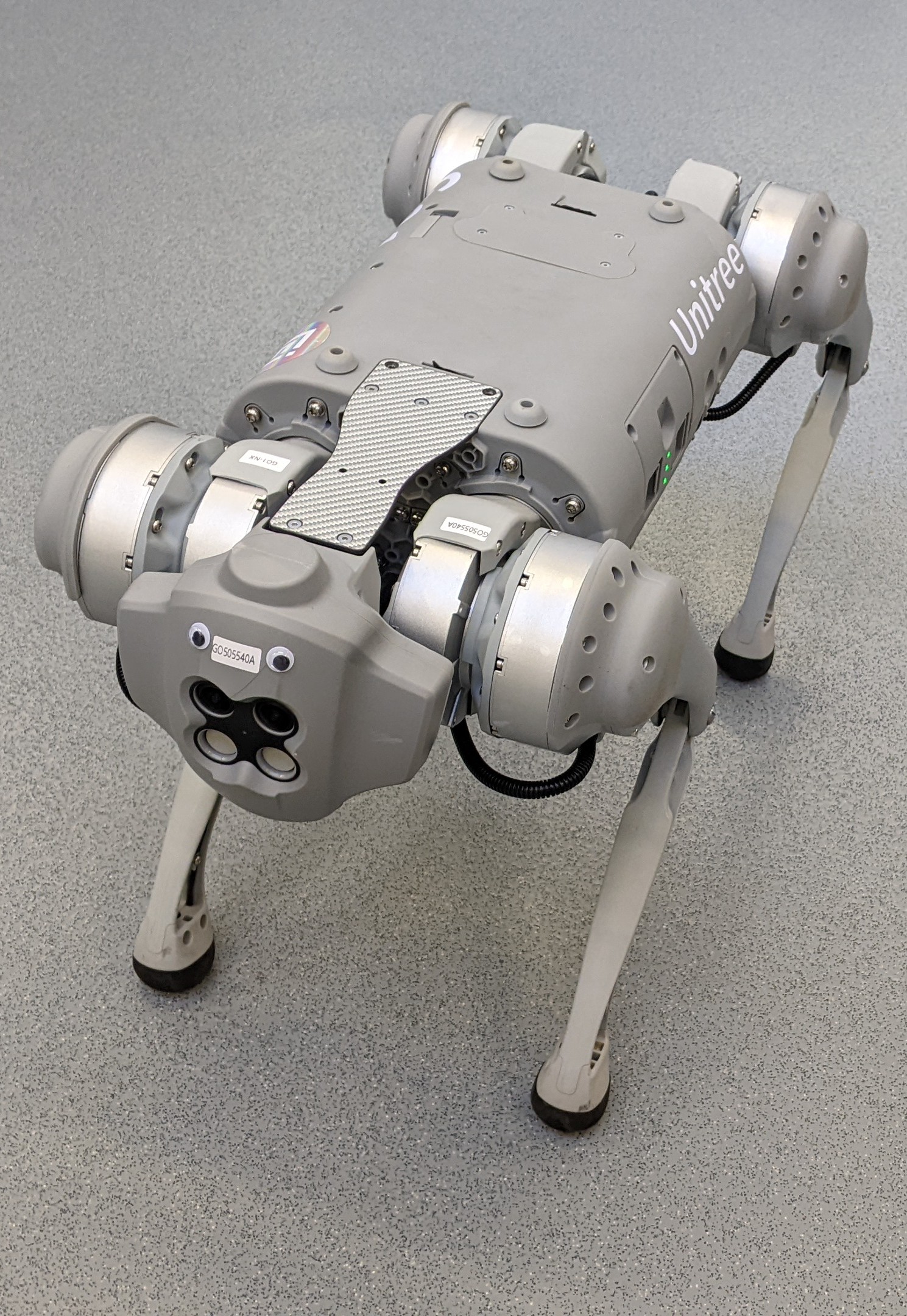
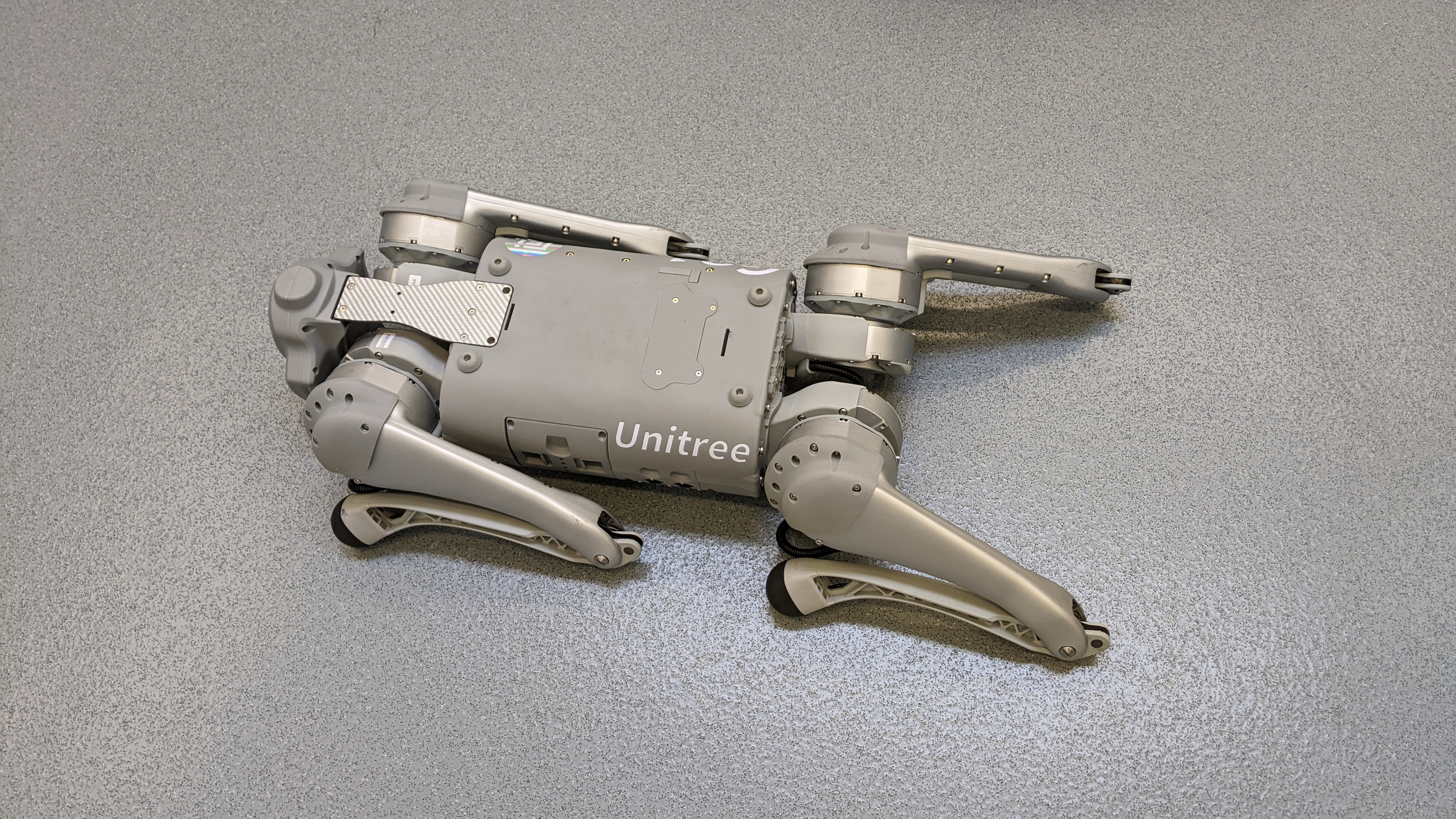
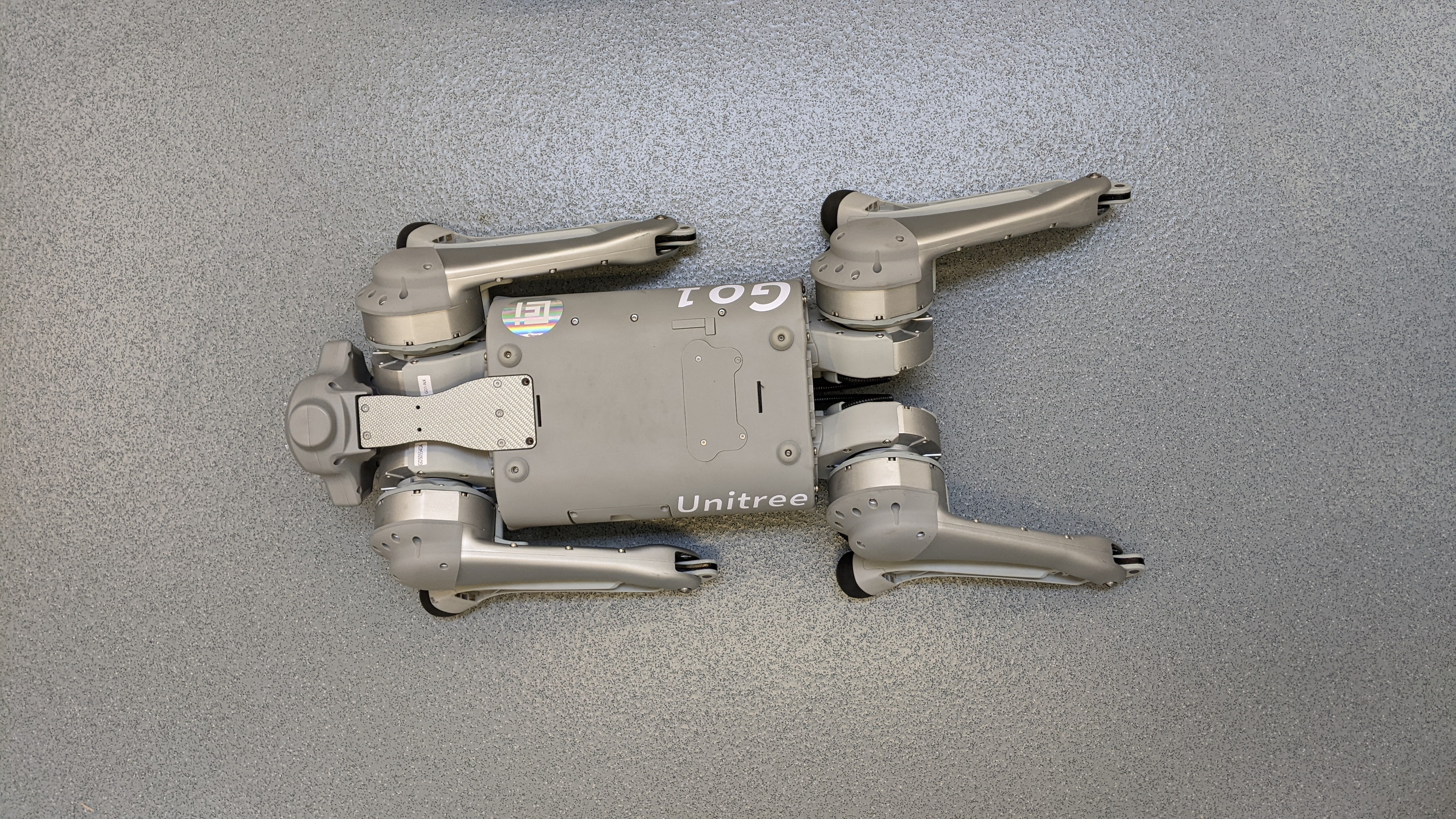
Ensure that the Go1 is placed on a flat and levelled surface. The robot's abdominal support pad should be flat on the ground and the body should not be tilted. The robot's startup position should look like the images below.
Power on
-
Power on remote control: To do this double click the power button, but on the second click hold down the power button for about 5 seconds or until you hear a beep-beep.
-
Power on robot dog: Power on the robot dog by double clicking on the power button of the robot dog but again hold it down until you see the green LED lights turn on and off. After a couple of minutes, you should see it stand up.
Shutting down
Ensure that the robot is standing still. If it is in motion, bring it to a stop.
Once the robot is standing still press and hold the L2 button. While holding the L2 button, press down on the A button twice and then press down on the B button. Now you can let go of the L2 button.
The short version of this instruciton is HOLD L2 + A + A + B RELEASE L2.
The robot dog should now be laying on the floor similar to the starting position.
Power off
-
Power off the robot dog: You can power off the robot dog by double clicking on the power button of the robot dog but hold it down until you see the green LED lights turn off.
-
Power off the remote control: To do this double click the power button, but on the second click hold down the power button for about 5 seconds or until you hear a beep-beep
Controlling Go1
The Go1 can be controlled using the remote control that comes with it, through its SDK and using ROS. However, this document will only cover the remote control aspect.
Basic controls using the remote control
Controlling the Go1 using its remote control is covered in more detail in the induciton, therefore please ensure to book and attend the induction before using this robot.
- Left stick - Controls the position of the robot, as in you can move it forward, backward, left and right.
- Right stick - Controls the orientaiton of the robot, as in yaw, pitch and roll.
All other controls and combination of controls can be found on the remote controller.