Soft Robotics
Soft robotics is a branch of robotics that makes use of compliant (e.g. soft, stretchy, flexible) rather than rigid materials. These kinds of robots are particularly useful in applications involving people and other fragile objects, and they are of particular interest in medical robotics (including surgery, drug delivery and assistive robotics).
Often soft robots are based on biological organisms (which are themselves compliant), and make use of features such as artificial tendons, muscles and blood vessels.
Making Soft Robots at the CCI
Inflatables
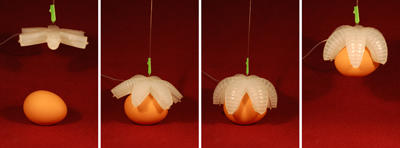
The classic image of the soft robotic 'tentacle' is made from cast stretchy rubber, with a chamber that guides airflow through a shaped internal structure. As air flows through the chamber, the shape causes the robot to bend in different directions.
We have Ecoflex 00-30 and 00-50 Silicon Cure Rubber (00-50 is harder, 00-30 is softer and stretchier). This is a skin-safe silicon rubber that can be cast into 3D-printed moulds. We also have air syringes (for manual testing), and 5V air pumps, tubing and valves.
If you're interested in using the silicon, come and chat to the technicians to borrow it. We have some example moulds and tentacles in the hack space.
Textiles
It's also possible to fabricate robotic limbs using the knitting machine, using threads/wires woven into knitted fabric as tendons. CMU's Morphing Matter lab has a project on creating knitted actuators. We've not done much research into this here but want to develop it further, if you're interested come and chat to us.

FormLabs 3d Printer
Coming soon!
Resources
The website Soft Robotics Toolkit was developed as part of an educational initiative by the Harvard Biodesign Lab, and has a huge amount of resources, design guides and learning materials for working with soft robotics. In particular, their OpenSCAD-based design tool
Research
If you're looking for inspiration in developing soft robotics, the following groups are all producing interesting research:
- Whitesides Lab at Harvard University
- Bristol Robotics Lab Soft Robotics Research Group
- Carnegie Mellon University Morphing Matter Lab
- MIT's Self Assembly Lab
- ETH Zurich's Soft Robotics Lab